bluepill-from-scratch: 01.5-blinkasm
01.5-blinkasm
tl;dr
full source here.
assemble:
arm-none-eabi-as blink.s -o blink.olink:
arm-none-eabi-ld -T link.ld blink.o -o blink.elfflash:
./flash.exp blink.elffrom scratch
Our goal is to write a program in assembly which blinks the LED connected to PC13 of our STM32F103C8T6.
First, we need to know which assembler to use. We’ll stick with GNU
tools, chiefly arm-none-eabi-as and
arm-none-eabi-ld. This is important information for writing
our assembly, as it directly affects the code we write.
“Assembly” is just any low-level programming language which closely resembles the direct use of a CPU architecture’s hardware-level instruction set. It provides syntax that corresponds to instruction encodings, because typing out each instruction bitfield in binary by hand would be an egregious waste of time. We need an assembler to translate the syntax into instruction encodings and do other convenient things.
The next step is to identify our CPU and therefore our architecture/ISA. The STM32F103 microcontroller in our bluepill uses an ARM Cortex-M3 CPU. According to the Cortex-M3 reference manual [1], it uses the ARMv7-M architecture which uses a subset of the Thumb-2 ISA. The Thumb-2 ISA is what we’re interested in.
Introduced with the ARMv6T2 architecture [2], Thumb-2 is an extension of the pre-UAL 16-bit-only instruction width Thumb ISA. Thumb-2 allows the use of both 16-bit and 32-bit instruction widths, with the idea being to combine code density and performance. With its introduction came the Unified Assembler Syntax (UAL), which provides a single assembly syntax (i.e., the mnemonic and operands of each instruction) to supersede the previous separate syntaxes of the ARM ISA (32-bit) and Thumb ISA (16-bit). The assembler then translates the UAL syntax into the appropriate operations for either Thumb or ARM, or returns errors when an operation is unsupported.
With this information, we write the first three lines of our code. These are GNU Assembler ARM-dependent directives [3][4].
.syntax unified
.cpu cortex-m3
.thumb.syntax unified tells GNU assembler that we’re using the
ARM UAL, and .thumb tells GNU assembler that our CPU
supports mixed 16-bit and 32-bit instruction widths, instead of the
fixed 32-bit .arm ISA. The directive
.cpu cortex-m3 specifies our target processor, so that the
assembler may recognize unsupported instructions for this core and issue
errors at the time of assembly. Otherwise, it defaults to a permissive
mode where certain .thumb instructions that we don’t
support are encoded anyways, resulting in hardfaults at run-time. In our
case we only use base Thumb-2 instructions, so it isn’t absolutely
necessary here.
You might be wondering why the directive isn’t something like
.thumb-2. This is because in the context of post-UAL assembly, Thumb-2 essentially replaces the old Thumb which used to refer to 16-bit only instructions, such that Thumb now refers to the new mixed 16-bit/32-bit instruction set [5]. ARM Holdings likes to make stuff as confusing as possible.
With the hard part out of the way (navigating ARM terminology) , we can start writing the actual code. We’ll start with the vector table and the four entries necessary to start running code.
.section .vectors
.word 0x20005000
.word reset_handler + 1
.word nmi_handler + 1
.word hardfault_handler + 1The assembler directive .section places the following
.word values into an input section labeled
.vectors, which we know our linker script is looking for.
This ensures it is placed predictably at the very beginning of the
.text output section – and thus the flash – where the
Cortex-M3 can find it, regardless of where in the assembly the vector
table is defined. The indentation is purely cosmetic.
0x20005000 is the top of our stack. The hardware needs
this value in order to know where to start growing the stack downwards.
The top of our stack is also the last byte of RAM. Top of stack = end of
ram = RAM start + RAM size = 0x20000000 + 20KB = 0x20000000 + 0x5000 =
0x20005000.
The other three values are the addresses of the interrupt handlers
considered the bare-minimum in order for the core to start executing
code. reset_handler is our code entry point, called upon..
reset. nmi_handler (Non-Maskable Interrupt) is needed for
serious external failures like power loss, and
hardfault_handler is needed here for every other type of
fault [6], most commonly something like an
invalid memory access. The processor triggers these handlers so that we
stop running application code when something bad happens and can thus do
what we need to do before all hell breaks loose, like gracefully shut
down or gather valuable debugging information. With these three
handlers, the processor is satisfied.
Why are we adding 1 to the handler addresses? It has to do with
interworking, which is the ability to switch between ARM (32-bit only)
and Thumb (16/32-bit) execution mid-program for performance/code-size
reasons. To accommodate this, some instructions which branch to code
must use the LSB of the address to denote whether the code being
branched to should be executed as Thumb or ARM code, where
1 = Thumb , and 0 = ARM [7][8][9]. Addresses used in these instructions
are called “interworking addresses”. It seems vector addresses also
classify as interworking addresses. In the case of Thumb-only processors
like the Cortex-M3, a UsageFault will be generated if bit[0] of any
interworking address is not 1, which is why we add 1 to set the handler
LSBs. You might be wondering why we need to tell a Thumb-only processor
that we are executing Thumb code. For consistency, I guess.
We then switch back to placing code in the .text input
section, which is where program code normally goes without any
directives.
.section .textWith that, we start defining functions. Officially these are called labels, as all they really do is attach a name to an address for our convenience.
nmi_handler:
b nmi_handler
hardfault_handler:
b hardfault_handlerHere we simply define nmi_handler and
hardfault_handler as infinite loops, as we did in C. We
just use b because we are branching unconditionally and
don’t care about linking.
.global reset_handler
reset_handler:We use the .global directive for
reset_handler so that the linker script can find it for the
ENTRY() command. Functions are static/local by default in
assembly.
ldr r0, =0x40021018 @ RCC_APB2ENR
ldr r1, [r0]
orr r1, #0x10 @ set bit 4 (IOPCEN)
str r1, [r0]Here we load the address for RCC_APB2ENR as a constant
using ldr = , then access the contents of that address,
reading them into r1. We set bit 4 with a bitwise
orr to enable the clock for GPIO port C. We then write the
modified contents back into RCC_APB2ENR with
str.
Our first instruction here
(ldr <reg>, =<expression>) is a
“psuedo-instruction”, in that it’s sort of a placeholder that gets
translated by the assembler into a different instruction. It isn’t
defined as a single instruction by either the ARM Cortex-M3 or ARMv7-M
reference manuals. Instead, it’s defined by the assembler, here [10] for GNU and here [11] for armasm. It’s useful in that it
automatically gets translated into the most efficient single instruction
for loading any constant, either into a mov or
movw if the constant fits in the instruction, or into an
ldr Rd, [PC, #offset] by creating a literal pool
(.word) for the constant and calculating the PC offset for
referencing the literal pools. Without the assembler, this process would
be tedious and error-prone. We could also do something like:
.equ RCC_APB2ENR, 0x40021018
movw r0, #:lower16:RCC_APB2ENR
movt r0, #:upper16:RCC_APB2ENRwhich should be faster, but I chose to target smaller code size with
ldr = [12] .
The next section is very similar.
ldr r0, =0x40011004 @ GPIOC_CRH
ldr r1, [r0]
orr r1, #0x100000 @ set bit 20
str r1, [r0]We do the same thing here for GPIOC_CRH, setting bit 20
to enable output mode for PC13.
If you’re wondering how we fit that huge 21-bit immediate into the
32-bit orr instruction, it’s because the constant is
encoded in such a way that it gets broken down into a constant and a
rotate right value, such that even 32-bit immediates may fit into only
12 instruction bits. Not all 32-bit values can be encoded this way, as
it only fits values that can be constructed by taking an 8-bit value and
rotating it by a 5-bit (0-31) value. It works well for setting bits and
bitfields 8-bits wide or less that are shifted some amount, but a value
like 0x12345678 for example cannot be encoded this way. The
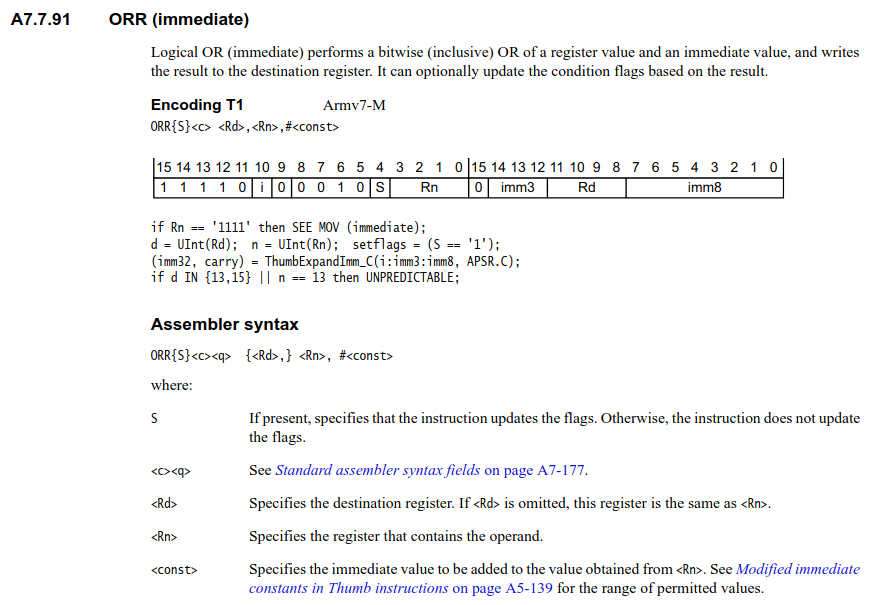
exact logic is described in psuedocode by the ARMv7-M reference
manual:
ORR
As you can see, the immediate is encoded into
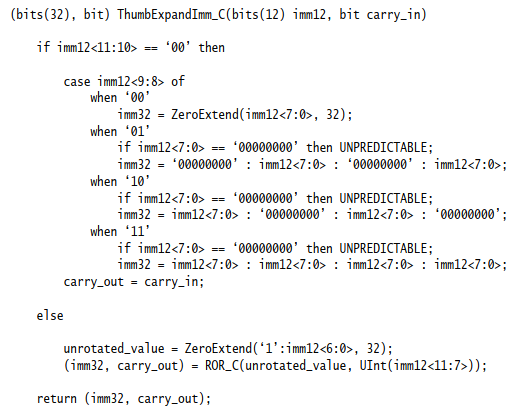
i:imm3:imm8and passed to the functionThumbExpandImm_C().(imm32, carry) = ThumbExpandImm_C(i:imm3:imm8, APSR.C);Here’s the logic for
ThumbExpandImm_C().
To demonstrate, I’ll skip ahead and grab the disassembly of our
orrinstruction, which will have the full instruction encoding that the assembler generated.f441 1180 orr.w r1, r1, #1048576 @ 0x100000Converting the instruction encoding
0xf441 1180into binary, we can see the values fori,imm3, andimm8:
and if we create
imm12from these bitfields,
we can plug it into
ThumbExpandImm_C(imm12, carry_in)to get:ROR_C(0x80, 19)A.k.a., rotate right
0x80by19bits. This is also known as a circular right shift.00000000000000000000000010000000 Rotate Right >> 19 -------------------------------- 00000000000100000000000000000000 = 0x100000 = 1048576 = (1 << 20)And thus, we get our original 21-bit immediate for
(1 << 20).Fortunately, the assembler generates these encodings for us.


With RCC and GPIOC configured, it’s time to blink the LED.
ldr r2, =0x4001100C @ GPIOC_ODR
main_loop:Here we load the address of GPIOC_ODR into
r2 and enter our main_loop.
main_loop:
ldr r1, [r2]
orr r1, #0x2000 @ set bit 13 (turn off LED)
str r1, [r2]
ldr r0, =500000 @ delay cntr = 500000
delay_1:
subs r0, #1
bne delay_1
ldr r1, [r2]
bic r1, #0x2000 @ clear bit 13 (turn on LED)
str r1, [r2]
ldr r0, =50000 @ reset delay cntr to 50000
delay_2:
subs r0, #1
bne delay_2
b main_loop @ repeatIn our main_loop, we set PC13, delay, clear PC13, delay,
and repeat.
The s suffix in subs means that the
instruction updates the flags, including the Zero (Z) flag, which
bne checks before branching. It loops until r0
is 0.
We also set the delay counter for delay_2 to be 10x
shorter, just to distinguish it from our prior blink programs written in
C.
Now it’s time to see if we really get a blinking LED.
Assemble,
arm-none-eabi-as blink.s -o blink.olink,
arm-none-eabi-ld -T STM32F103C8T6.ld blink.o -o blink.elfand flash:
./flash.exp blink.elf
Heck yea.
It’d be kinda fun to see if we made any improvements in code size, so let’s compare:
[01-blinkasm]$ arm-none-eabi-size blink.elf
text data bss dec hex filename
92 0 0 92 5c blink.elf
[02-blink]$ arm-none-eabi-size blink.elf
text data bss dec hex filename
88 0 0 88 58 blink.elfDamn.. 4 extra bytes compared to the same program written in C and
compiled with -Os. I guess we’ll let GCC write the assembly
from now on.
If you’re curious, the following tab dives into the disassemblies to show how they saved those 4 bytes.
comparison
arm-none-eabi-objdump -d blink.elfblink.c disassembly
################# ## blink.c (-Os) ################# blink.elf: file format elf32-littlearm Disassembly of section .text: 08000000 <vector_table>: 8000000: 00 50 00 20 15 00 00 08 11 00 00 08 13 00 00 08 .P. ............ 08000010 <nmi_handler>: 8000010: e7fe b.n 8000010 <nmi_handler> 08000012 <hardfault_handler>: 8000012: e7fe b.n 8000012 <hardfault_handler> 08000014 <reset_handler>: 8000014: 4a0d ldr r2, [pc, #52] @ (800004c <reset_handler+0x38>) 8000016: 6993 ldr r3, [r2, #24] 8000018: f043 0310 orr.w r3, r3, #16 800001c: 6193 str r3, [r2, #24] 800001e: 4b0c ldr r3, [pc, #48] @ (8000050 <reset_handler+0x3c>) 8000020: 685a ldr r2, [r3, #4] 8000022: f442 1280 orr.w r2, r2, #1048576 @ 0x100000 8000026: 605a str r2, [r3, #4] 8000028: 68da ldr r2, [r3, #12] 800002a: f442 5200 orr.w r2, r2, #8192 @ 0x2000 800002e: 60da str r2, [r3, #12] 8000030: 4a08 ldr r2, [pc, #32] @ (8000054 <reset_handler+0x40>) 8000032: bf00 nop 8000034: 3a01 subs r2, #1 8000036: d1fc bne.n 8000032 <reset_handler+0x1e> 8000038: 68da ldr r2, [r3, #12] 800003a: f422 5200 bic.w r2, r2, #8192 @ 0x2000 800003e: 60da str r2, [r3, #12] 8000040: 4a04 ldr r2, [pc, #16] @ (8000054 <reset_handler+0x40>) 8000042: bf00 nop 8000044: 3a01 subs r2, #1 8000046: d1fc bne.n 8000042 <reset_handler+0x2e> 8000048: e7ee b.n 8000028 <reset_handler+0x14> 800004a: bf00 nop 800004c: 40021000 .word 0x40021000 8000050: 40011000 .word 0x40011000 8000054: 0007a120 .word 0x0007a120blink.s disassembly
################# ## blink.s ################# blink.elf: file format elf32-littlearm Disassembly of section .text: 08000000 <nmi_handler-0x10>: 8000000: 20005000 .word 0x20005000 8000004: 08000015 .word 0x08000015 8000008: 08000011 .word 0x08000011 800000c: 08000013 .word 0x08000013 08000010 <nmi_handler>: 8000010: e7fe b.n 8000010 <nmi_handler> 08000012 <hardfault_handler>: 8000012: e7fe b.n 8000012 <hardfault_handler> 08000014 <reset_handler>: 8000014: 480d ldr r0, [pc, #52] @ (800004c <delay_2+0x8>) 8000016: 6801 ldr r1, [r0, #0] 8000018: f041 0110 orr.w r1, r1, #16 800001c: 6001 str r1, [r0, #0] 800001e: 480c ldr r0, [pc, #48] @ (8000050 <delay_2+0xc>) 8000020: 6801 ldr r1, [r0, #0] 8000022: f441 1180 orr.w r1, r1, #1048576 @ 0x100000 8000026: 6001 str r1, [r0, #0] 8000028: 4a0a ldr r2, [pc, #40] @ (8000054 <delay_2+0x10>) 0800002a <main_loop>: 800002a: 6811 ldr r1, [r2, #0] 800002c: f441 5100 orr.w r1, r1, #8192 @ 0x2000 8000030: 6011 str r1, [r2, #0] 8000032: 4809 ldr r0, [pc, #36] @ (8000058 <delay_2+0x14>) 08000034 <delay_1>: 8000034: 3801 subs r0, #1 8000036: d1fd bne.n 8000034 <delay_1> 8000038: 6811 ldr r1, [r2, #0] 800003a: f421 5100 bic.w r1, r1, #8192 @ 0x2000 800003e: 6011 str r1, [r2, #0] 8000040: f24c 3050 movw r0, #50000 @ 0xc350 08000044 <delay_2>: 8000044: 3801 subs r0, #1 8000046: d1fd bne.n 8000044 <delay_2> 8000048: e7ef b.n 800002a <main_loop> 800004a: 0000 .short 0x0000 800004c: 40021018 .word 0x40021018 8000050: 40011004 .word 0x40011004 8000054: 4001100c .word 0x4001100c 8000058: 0007a120 .word 0x0007a120First of all, while looping they used 2
nopinstructions to our 0, which means they’re starting from a 4-byte deficit and need to otherwise save 8 bytes.They saved 4 bytes here by using offsets instead of 2 separate words,
8000050: 40011000 .word 0x40011000 vs. 8000050: 40011004 .word 0x40011004 8000054: 4001100c .word 0x4001100cThey saved 2 bytes here by re-using the GPIOC register and adding the offset instead of defining a separate register
8000028: 68da ldr r2, [r3, #12] 800002a: f442 5200 orr.w r2, r2, #8192 @ 0x2000 vs. 8000028: 4a0a ldr r2, [pc, #40] @ (8000054 <delay_2+0x10>) 800002a <main_loop>: 800002a: 6811 ldr r1, [r2, #0] 800002c: f441 5100 orr.w r1, r1, #8192 @ 0x2000And finally they saved another 2 bytes here when our
ldr =got translated into amovwinstruction, which is 32 bits wide.8000040: 4a04 ldr r2, [pc, #16] @ (8000054 <reset_handler+0x40>) vs. 8000040: f24c 3050 movw r0, #50000 @ 0xc350This happened because we used 50,000 instead of 500,000 for the second delay. 500,000 was already defined for the first delay, so
blink.cwas able to just re-use that.wordvalue with a 16-bitldrinstruction. Ourblink.son the other hand had to define both 500,000 as a.wordand 50,000 as an immediate within a 32-bitmovwinstruction.Those are the 8 bytes!
Also, if you were curious about this instruction, it’s to align the upcoming
.wordvalues to 4 bytes. GCC did it with anop.800004a: 0000 .short 0x0000When we applied the first 2 changes and saved 6 bytes, we automatically saved another 2 bytes when our literal pools happened to get word-aligned, removing the need for the 16-bit, 2 byte
.shortdirective. So, we saved the 8 bytes without sacrificing our distinguishing asymmetrical blink delay!Here’s our program with those 8 bytes reclaimed if you’re interested:
blink.s
.syntax unified .cpu cortex-m3 .thumb .section .isr_vector .word 0x20005000 .word reset_handler + 1 .word nmi_handler + 1 .word hardfault_handler + 1 nmi_handler: b nmi_handler hardfault_handler: b hardfault_handler .global reset_handler reset_handler: ldr r0, =0x40021018 @ RCC_APB2ENR ldr r1, [r0] orr r1, #0x10 @ set bit 4 (IOPCEN) str r1, [r0] ldr r0, =0x40011004 @ GPIOC_CRH ldr r1, [r0] orr r1, #0x100000 @ set bit 20 (output 10MHz, open-drain) str r1, [r0] main_loop: ldr r1, [r0, #8] @ GPIOC_ODR 0x4001100C orr r1, #0x2000 @ set bit 13 (turn off LED) str r1, [r0, #8] ldr r1, =500000 @ delay cntr = 500000 delay_1: subs r1, #1 bne delay_1 ldr r1, [r0, #8] bic r1, #0x2000 @ clear bit 13 (turn on LED) str r1, [r0, #8] ldr r1, =50000 @ reset delay cntr to 50000 delay_2: subs r1, #1 bne delay_2 b main_loop @ repeat[samu@yoga 01-blinkasm]$ arm-none-eabi-size blink.elf text data bss dec hex filename 84 0 0 84 54 blink.elf
If we wanted to make our program and linker script as minimal as possible, we can forego the separate input section for the vector table and rely on defining it at the top of our assembly code.
An absolutely minimal script/assembly combination would look like the following:
minblink
/* minlink.ld */ SECTIONS { . = 0x8000000; .text : { *(.text) } }/* minblink.s */ .syntax unified .thumb .word 0x20005000 .word reset_handler + 1 .word nmi_handler + 1 .word hardfault_handler + 1 nmi_handler: b nmi_handler hardfault_handler: b hardfault_handler reset_handler: ldr r0, =0x40021018 @ RCC_APB2ENR ldr r1, [r0] orr r1, #0x10 @ set bit 4 (IOPCEN) str r1, [r0] ldr r0, =0x40011004 @ GPIOC_CRH ldr r1, [r0] orr r1, #0x100000 @ set bit 20 (output 10MHz, open-drain) str r1, [r0] main_loop: ldr r1, [r0, #8] @ GPIOC_ODR 0x4001100C orr r1, #0x2000 @ set bit 13 (turn off LED) str r1, [r0, #8] ldr r1, =500000 @ delay cntr = 500000 delay_1: subs r1, #1 bne delay_1 ldr r1, [r0, #8] @ GPIOC_ODR 0x4001100C bic r1, #0x2000 @ clear bit 13 (turn on LED) str r1, [r0, #8] ldr r1, =50000 @ reset delay cntr to 50000 delay_2: subs r1, #1 bne delay_2 b main_loop @ repeat
That about does it.
It was fun, but I think I’ll stick with C.
references
[3] https://sourceware.org/binutils/docs/as/ARM-Directives.html
[4] https://sourceware.org/binutils/docs/as/ARM_002dInstruction_002dSet.html
[8] https://developer.arm.com/documentation/ddi0337/h/programmers-model/exceptions?lang=en
[9] https://developer.arm.com/documentation/ddi0403/ee/?lang=en (A4.1.1)
[10] https://sourceware.org/binutils/docs/as/ARM-Opcodes.html



